
























Unit Ultrasonic-I2C
SKU:U098-B1







Description
The Unit Ultrasonic-I2C is an ultrasonic distance measurement sensor with an I2C communication interface. The hardware utilizes the RCWL-9620 ultrasonic distance measurement chip paired with a 16 mm probe, enabling precise distance measurement within a range of 2 cm to 450 cm (with an accuracy of ±2%). As an I2C slave device, the sensor can share bus resources with other I2C devices, maximizing IO resource savings. It is ideal for applications such as robot obstacle avoidance and liquid level detection.
Note: When measuring distances greater than 3.5 meters, there may be a slight delay in the distance measurement response.
Features
- RCWL-9620
- I2C communication interface (addr: 0x57)
- Range: 2cm-450cm
- Protective cover for stable circuit operation
- Built-in temperature compensation to reduce probe temperature drift
- Supports UIFlow graphical programming
Includes
- 1 x Unit Ultrasonic-I2C
- 1 x HY2.0-4P Grove cable (20cm)
Applications
- Robot obstacle avoidance
- Liquid level measurement
- Posture detection
Specifications
| Specification | Parameter |
|---|---|
| Ultrasonic Ranging SoC | RCWL-9620 |
| Range | 2cm ~ 450cm |
| Communication Interface | I2C @0x57 |
| Probe Specification | 16mm |
| Receive / Transmit Frequency | 40KHz |
| Receiving Sensitivity | -65dB |
| Directional Angle | 60° |
| Measurement Accuracy | ±2% |
| Measurement Cycle | 50ms |
| Working Current | 3mA |
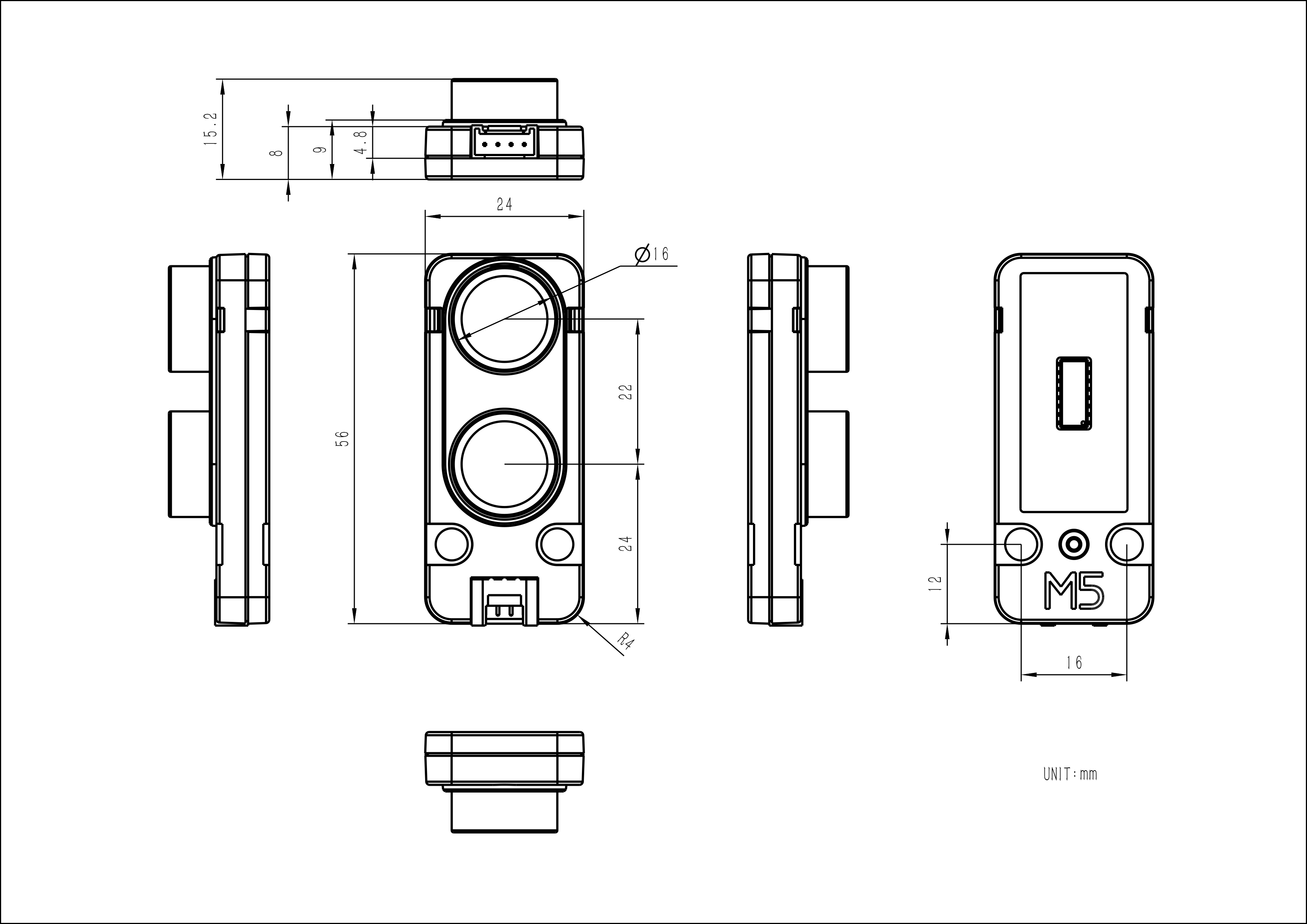
| Product Size | 56.0 x 24.0 x 15.0mm |
| Product Weight | 10.0g |
| Package Size | 75.0 x 45.0 x 30.0mm |
| Gross Weight | 26.0g |
PinMap
Unit Ultrasonic-I2C
| HY2.0-4P | Black | Red | Yellow | White |
|---|---|---|---|---|
| PORT.A | GND | 5V | SDA | SCL |
Model Size
Datasheets
Softwares
Arduino
- Unit Ultrasonic-I2C Test Example with M5Atom
- Unit Ultrasonic-I2C Test Example with M5Core
- Unit Ultrasonic-I2C Test Example with M5Core2
- Unit Ultrasonic-I2C Test Example with M5StickC
- Unit Ultrasonic-I2C Test Example with M5StickCPlus
UiFlow2
Video
- Unit Ultrasonic-I2C Car Obstacle Avoidance
- UiFlow2 Unit Ultrasonic-I2C